Icon
Command
Shortcut Key
Toolbar
![]()
TURNRUNSIMULATION
Turn
Run the turning manoeuvre simulation along the defined track path.
|
Icon |
Command |
Shortcut Key |
Toolbar |
|
|
TURNRUNSIMULATION |
|
Turn |
Simulate the movement of a vehicle along a predefined path in the direction specified in the Setup.
The direction in the Setup can be set to either forward or reverse. This direction refers to the vehicle itself, and not the direction in which the vehicle travels on the track path.
While the simulation is taking place, the program constantly checks whether the vehicle exceeds its maximum steering angle, as well as the maximum angles between the tractor and trailers.
When these maximum angles are exceeded, the program stops the simulation and prompts a reason why it has stopped. This action can, however, be overridden by deselecting the Enforce Steering Angle limits checkbox in the Setup.
Procedure
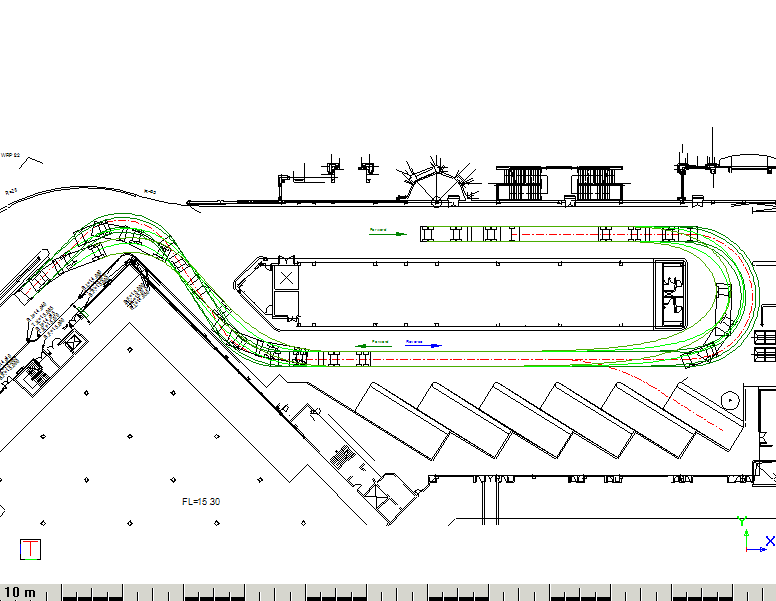
There are two directions of simulation - forward movement and reverse movement.
When the vehicle is moving in a forward direction, the centre point of its front axle is always on the specified track path. The angle of its front wheels are always parallel to the tangent line on a circle, or parallel to a straight line.
The rear wheels of the vehicle always follow a straight line between its current position and the previous position of the front wheels. The same rule applies when there are trailers connected to the vehicle.
The assumption is made that the vehicle is moving at very low speed (parking speed). When a vehicle then enters a curve, the driver is able to turn the wheels in the new direction within a negligibly short distance. Therefore, no transition curves have to be used for forward motion.
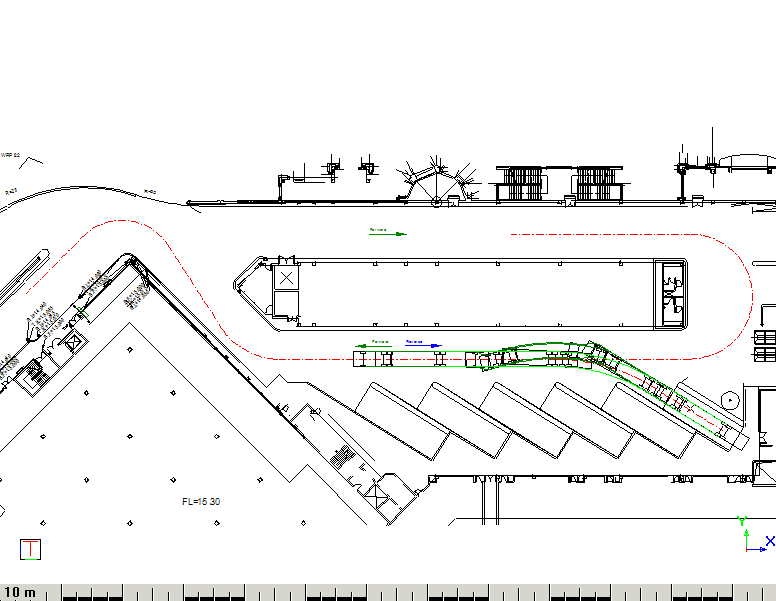
In the reverse direction, the centre point of the rear axle of the vehicle or last trailer follows the track path. This rear axle is always perpendicular to the tangent line on a circle, or straight line. This also determines the angle at which the vehicle is travelling, and the angle of the steering wheels is then be calculated accordingly.
When there are trailers connected to the vehicle, it is no longer safe to assume that no transition curve is needed, although the vehicle is moving at a very low speed. The driver of the vehicle must manoeuvre the vehicle in such a way that it pushes the trailer into the curve.
In order to perform such a manoeuvre, there must be a transition period before the trailer enters or exits the circular curve. This also means that the centre of the trailer’s rear axle no longer follows the defined path around the circular curve exactly.
This discrepancy depends on the length of the transition curves, which the program calculates according to the maximum steering angle of the vehicle. This ensures that the transition curves, and therefore the discrepancy be kept as short as possible.
The direction of movement, active vehicle and the coordination interval can be changed without re-defining the track path. The program automatically re-coordinates the track path and inserts transition curves when needed.
 Because a driver can successfully negotiate the same turn in different ways, additional allowance must be made for driver variability, according to sound engineering judgment over and above what might have been made during forward manoeuvres.
Because a driver can successfully negotiate the same turn in different ways, additional allowance must be made for driver variability, according to sound engineering judgment over and above what might have been made during forward manoeuvres.
When simulating trailer or semi trailer reverse manoeuvres, an extra clearance of +- ¾ of the vehicle width should be applied on each side of the envelope.